

![[모터리언] Motorian](http://www.motorian.kr/wp-content/uploads/2013/05/aMotorianNWT-1-280-80.jpg) [모터리언] Motorian 자동차의 모든것
[모터리언] Motorian 자동차의 모든것
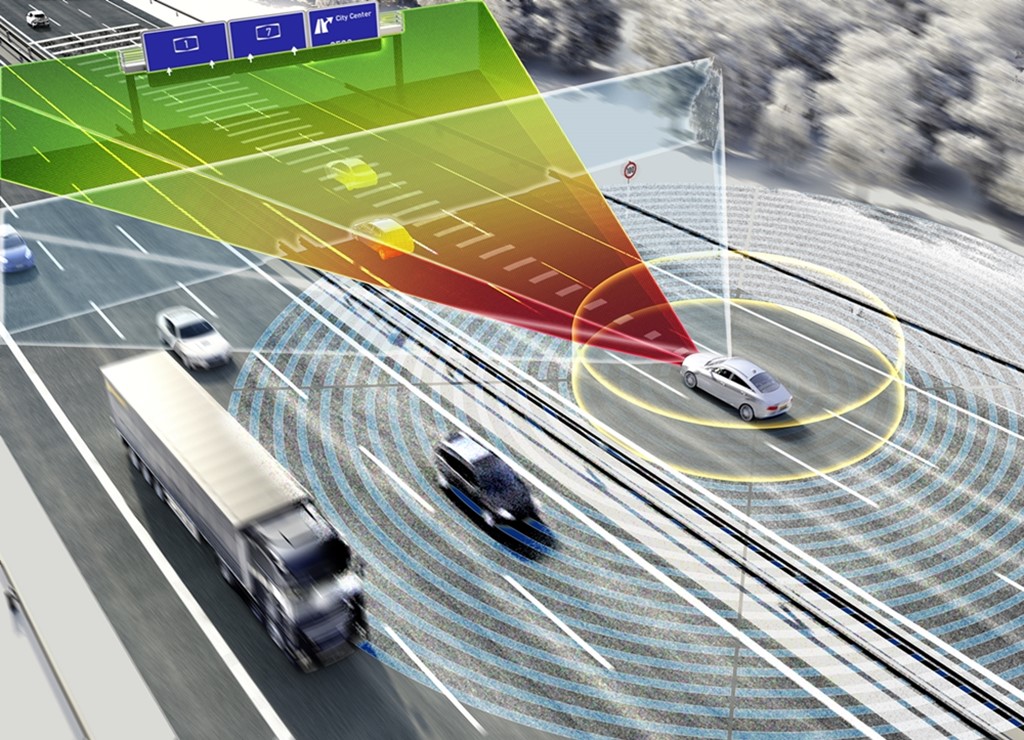
정교한 첨단 운전자 지원 시스템과 자율 주행의 기본적인 요건은 차량 주변의 환경을 안정적으로 감지하고, 이를 신속 정확하게 평가할 수 있는 능력이다. 세계적인 기술 기업 콘티넨탈 (continental-corporation.co.kr)은 현재 개발중인 차량의 주변 환경을 360도 사실 그대로 정확히 제공하는 차세대 환경 모델을 이번 2017 CES에서 선보인다. 자율 주행 차량이 운전자로부터 차량 제어 권한을 받으려면, 데이터를 지속적으로 확보, 처리 및 해석하는 동시에 전후 상황과 관련된 지식을 습득하고 발전시켜 나가야 한다. 이는 직선 고속도로 주행에서부터 복잡한 도시 환경에 이르기까지 모든 상황을 숙지해 고도화된 자율 주행을 실현할 수 있는 유일한 방법이다.
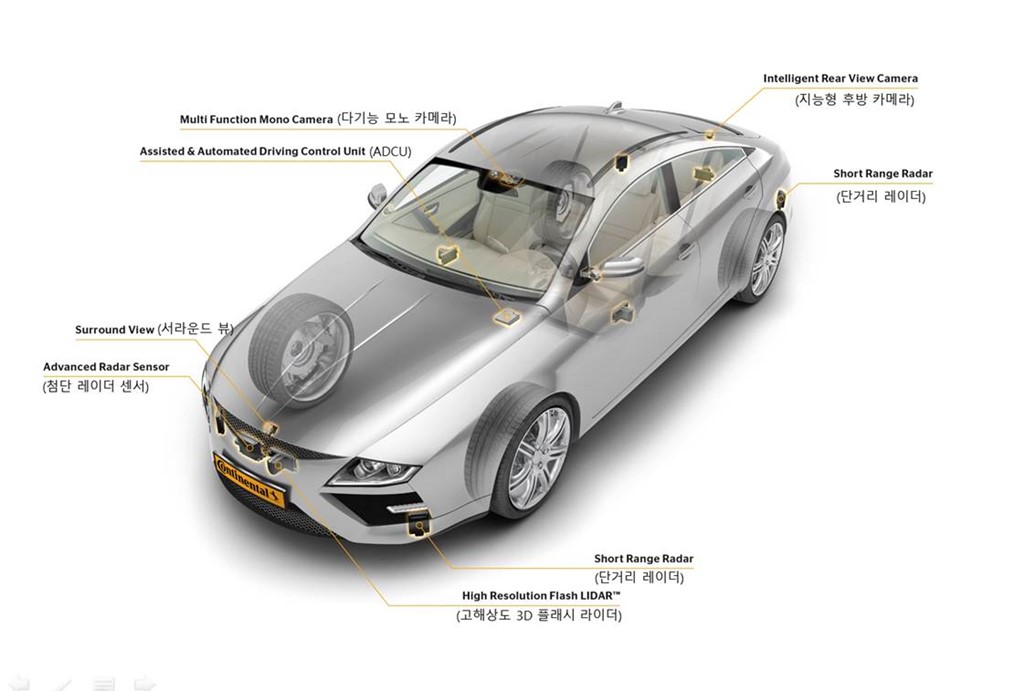
안정적인 환경 모델은 주변의 다른 차량들, 도로 경계선과 같은 고정된 물체, 차량의 정확한 위치, 교통량 관리 대책 등과 같이 매우 다양한 정보를 필요로 한다. 칼 하우프트(Karl Haupt) 콘티넨탈 ADAS 사업부 총괄 책임자는 “시스템이 필요한 정보를 단계적으로 확보하기 위해서는 레이더, 카메라, 서라운드 뷰(Surround View) 시스템과 같은 다양한 센서들이 필요하다. 이것은 인간의 수준, 혹은 그 이상으로 차량의 주변 환경을 이해할 수 있게 하기 위해서이다. 더 넓은 거리, 더 많은 센서, 수집된 데이터와 우수한 컴퓨터 시스템의 결과물을 통해 차량의 주변 환경을 더욱 선명하게 볼 수 있고, 지속적으로 파악할 수 있다”고 말했다.
레이더, 카메라, 서라운드 뷰 시스템 등 각각의 센서들은 저마다 물리적 장단점이 있기 때문에 일부 애플리케이션은 기능의 한계점을 가질 수도 있다. 예를 들어, 추가적인 백엔드 정보 외에 안정성과 견고함을 높이고 강력한 이중화를 위해서는 또 다른 센서가 필요하다. 하우프트 사업부 책임자는 “콘티넨탈은 이러한 이유로 차량 주변 모니터링과 관련해 엄격한 요건을 이상적으로 충족하는‘고해상도 3D 플래시 라이더(High Resolution 3D Flash LIDAR)’를 개발하고 있다. 라이더 센서는 실시간으로 3D 머신 비전 정보를 확보하고 처리하며, 어떠한 기계적인 부품도 포함되어 있지 않다”고 강조했다.
이처럼 다양한 센서에서 수집된 데이터는 개별 센서나 중앙 제어 장치에서 처리되어 이를 기반으로 차량 주변 환경에 대한 고정밀 환경 모델을 수립할 수 있다. 처리하고 분석하는 데이터 양이 많을수록 더 뛰어난 연산 능력이 필요하다. 이를 위해 현재의 환경 모델을 수립하고 관리하는데 사용되는 것보다 훨씬 강력한 제어 장치가 필요하다. 환경 모델은 개별 센서와 다양한 애플리케이션 사이에 있는 중간 소프트웨어 계층의 역할을 한다. 이 소프트웨어 계층은 정확성과 안정성을 높이고 개별 센서의 시야를 확대하기 위한 데이터 융합 및 기획 알고리즘을 포함하고 있으며, 다른 기능 측면에서 추상화 계층으로서 역할을 한다. 콘티넨탈의 ADCU(Assisted & Automated Driving Control Unit)는 확보한 모든 정보를 평가 및 해석하는 중심점 역할을 하며, 초 당 50회 이상의 환경 모델을 생성한다.

항공우주분야에서 도로까지 아우르는 ‘고해상도 3D 플래시 라이더’
고해상도 3D 플래시 라이더는 종합적인 3D 환경 모델을 생성하는 핵심 요소이다. 콘티넨탈의 아르노 라강드레(Arnaud Lagandré) 고해상도 3D 플래시 라이더 사업부 책임자는 “이미 항공우주 분야에서 사용되고 있는 고해상도 3D 플래시 라이더 기술은 주야에 상관 없이 차량 전체 주변 환경에 대한 보다 종합적이고 상세한 3D 뷰를 제공하고, 궂은 날씨에서도 안정적으로 작동한다”고 말했다. 콘티넨탈은 고해상도 3D 플래시 라이더의 추가로 첨단 운전자 지원 시스템의 차량 주변 센서 포트폴리오를 확장, 다른 센서와 결합해 높은 수준의 완전한 자율 주행을 지원할 수 있게 되었다. 고해상도 3D 플래시 라이더의 대량 생산은 2020년 시작될 예정이다.
오늘날 사용하고 있는 많은 스캐너 부품에 비해 고해상도 3D 플래시 라이더는 단 2개의 핵심 부품으로 구성돼 있다. 전송 소스 역할을 하며 카메라 플래시처럼 최대 200m가 넘는 거리의 차량 주변 환경을 비추는 레이저와 고집적 수신기 칩(highly integrated receptor chip)으로 구성된다. 고집적 수신기 칩은 디지털 카메라에 있는 센서 칩과 개념이 유사하지만, 레이저 펄스 전송 시간뿐만 아니라 각 픽셀마다 물체와의 거리에 상응하는 반사광을 기록할 수 있다는 점이 다르다. 이처럼 간단하지만 효율이 뛰어난 방식으로 레이저 플래시가 터질 때마다 주변 환경에 대해 매우 정확하고 왜곡이 없는 이미지를 생성할 수 있다.
라강드레 책임자는 “차량 근처나 200m 이상 떨어진 곳, 아니면 불과 몇 센티미터 떨어진 매우 근접한 환경이든 완벽한 3D 모델을 단 1.32 마이크로초(100만분의 1초)만에, 그리고1초 당 30회 주기로 생성할 수 있다. 또한, 개별 물체와의 거리도 정확하게 측정이 가능하다”고 설명하며, “복잡도가 낮고 산업적 적용 가능성이 높다는 것은 차량 주변에 다수의 센서를 효율적으로 설치해 차량 주변 환경에 대한 완전한 360도 실시간 이미지 생성이 가능함을 의미한다”고 덧붙였다.
자율 주행의 가장 엄격한 안전 요구 조건을 충족하는 중앙 컴퓨터
ADCU는 확보한 데이터를 평가 및 해석하고 궁극적으로 종합적인 주변 환경 모델을 생성하는데 이용된다. ADCU는 다양한 이종의 처리 장치 네트워크로 구성된 중앙 제어 장치이며, 전자 샤시와 안전 시스템을 상호 연결하는데 중요한 역할을 한다. 아울러, 독립적으로 작동했던 시스템을 상호 연결함으로써 기능적 범위를 넓혀준다. 개입 결정이 중앙에서 조율되기 때문에 각기 다른 시스템에서 동시에 개입하는 경우 서로 완벽하게 조화를 이루게 된다. 콘티넨탈 ADAS 사업부의 마이클 지덱(Michael Zydek) ADCU 제품 책임자는 “콘티넨탈에서 ADCU는 필수적인 기능안전 아키텍처를 실현하기 위한 핵심 요소인 동시에 자율 주행에 필요한 중앙집중식 환경모델과 주행 기능을 담당하는 중심 요소다”라고 말했다.
콘티넨탈의 목표는 2019년까지 가장 엄격한 자동차 기능안전성 국제표준인 ASIL D를 충족하는 확장 가능한 보조 및 자율 주행 제품 군을 공급하는 것이다. 제어 장치는 필요한 데이터 흐름을 관리하기 위해 다양한 이더넷 및 LVDS(Low Voltage Differential Signaling) 연결 기능을 갖추게 된다. 지덱 책임자는 “콘티넨탈은 개발 단계에서 보조 주행 제어 장치와 자율 주행 제어 장치를 구분한다. 전자는 첨단 운전자 지원 시스템을 위한 확장 가능한 제어 장치 모듈로, 모든 장비 단계마다 센서와 제어 장치로 구성된 비용 최적화된 완전한 패키지를 제공한다. 반면, 자율 주행을 위한 제어장치는 높은 수준의 자율 주행 요구조건을 충족하고 환경 모델의 특정 디지털 구조, ASIL D 컴퓨터 및 실시간 성능에 초점을 맞춘 강력한 성능의 컴퓨터”라고 말했다.
콘티넨탈은 미국 및 일본, 중국, 유럽에서 자율 주행에 필요한 부품과 시스템을 개발 및 생산하고 있다. 콘티넨탈의 기술진들은 자율 주행의 실현을 목표로 ▲센서 기술 ▲클러스터 연결성 ▲인간과 기계 간 커뮤니케이션 ▲시스템 아키텍처 ▲안정성 ▲자율 주행 수용 등 6대 핵심 요소에 집중하고 있다.

 인턴십 참가자 모집")




